В предыдущих двух частях мы рассмотрели вопрос передачи информации от Android-устройства в плату Arduino, и обратную задачу: передача информации от Arduino платы на устройство с Android. Настало время для объединения этих двух методик, чтобы получить полноценный двухсторонний обмен информацией между Android и Arduino.
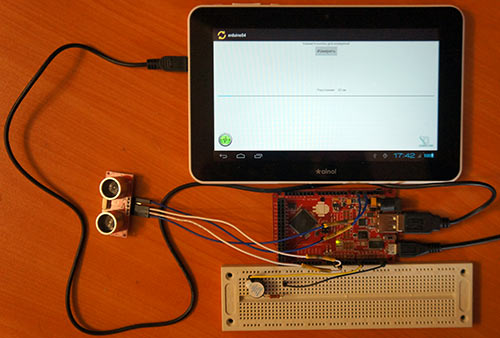
Для этого, мы соберем простенький проект с использованием ультразвукового дальномера и пьезо-буззера.

Алгоритм работы
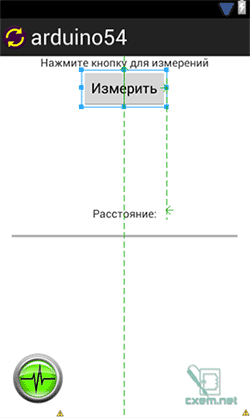
На экране устройства с Android отображается активити с кнопкой «Измерить», при нажатии на которую, на плату Arduino приходит соответствующая команда. Плата Arduino обрабатывает команду и начинает цикл измерений, после чего вычисляется средняя дистанция до препятствия в сантиметрах. Данное расстояние до обьекта, передается обратно в Android-устройство, где отображается в виде текста, а также на ползунке (ProgressBar).
В Android также происходит обработка данных: если расстояние до обьекта меньше 20 см, то происходит передача управляющего сигнала на Arduino для включения буззера. Это естественно можно было бы сделать и в коде Arduino, но для наглядности я возложил эту задачу на плечи Android устройства. В общем получился небольшой парктроник.
Итак, для начала необходимо определится с управляющими командами. Они должны быть одинаково определены и в Arduino и в Android устройстве. Я выбрал следующие числа:
1 — команда разрешения передачи
2 — команда запрета передачи
3 — команда включения буззера
С первыми двумя командами получилось немного запутано, т.к. я не смог заставить Android корректно принимать один посыл с данными (пробовал и в цикле передавать и по времени, но Android упорно не хочет принимать данные, подозреваю, что это связанно с ADB и при использовании Accessory Mode таких проблем быть не должно). Поэтому когда Arduino принял команду 1 (разрешение передачи) он производит замер расстояния и включает беспрерывную передачу данных в цикле. Как только Android принял данные, он передает к Arduino команду 2, чтобы тот остановил передачу данных.
Программа для Arduino
Скетч для Arduino:
#include #include // Adb connection. Connection * connection; // Adb connection. #define COMMAND_SEND_TRUE 1 // команда разрешения передачи #define COMMAND_SEND_FALSE 2 // команда запрета передачи #define COMMAND_PLAY_BEEP 3 // команда включения буззера const int numOfReadings = 10; // кол-во замеров (элементов массива) int readings[numOfReadings]; // значения измерений в массиве int arrayIndex = 0; // индекс элемента в массиве int total = 0; // всего значений int averageDistance = 0; // средняя дистанция // настройка пинов и переменных для УЗ датчика int echoPin = 2; // DYP_ME007 ECHO pin int initPin = 3; // DYP_ME007 TRIG pin int BeeperPin = 8; // pin буззера unsigned long pulseTime = 0; // длительность пульса в микросекундах unsigned long distance = 0; // расстояние в (см) boolean SendToAndroid = false; void setup() { pinMode(initPin, OUTPUT); pinMode(echoPin, INPUT); pinMode(BeeperPin, OUTPUT); // Буззер // формируем массив for (int thisReading = 0; thisReading < numOfReadings; thisReading++) { readings[thisReading] = 0; } Serial.begin(115200); // Инициализация подсистемы ADB. ADB::init(); // Open an ADB stream to the phone's shell. Auto-reconnect. Use any unused port number eg:4568 connection = ADB::addConnection("tcp:4568", true, adbEventHandler); } void loop() { if(SendToAndroid == true) makeDimension(); ADB::poll(); // Poll the ADB subsystem. } void adbEventHandler(Connection * connection, adb_eventType event, uint16_t length, uint8_t * data) { if (event == ADB_CONNECTION_RECEIVE) // Если приняли данные { Serial.print("data:"); // Вывод в Serial Monitor для отладки Serial.println(data[0],DEC); if((data[0]) == COMMAND_SEND_TRUE) SendToAndroid = true; // Флаг, что надо вкл. передачу данных else if ((data[0]) == COMMAND_SEND_FALSE) SendToAndroid = false; //Флаг, что данные приняты и откл. передачу данных else if ((data[0]) == COMMAND_PLAY_BEEP) playBeep(); } else if (event == ADB_CONNECTION_OPEN) Serial.println("ADB connection open"); else if (event == ADB_CONNECTION_CLOSE) Serial.println("ADB connection close"); else { Serial.println(event); } } void makeDimension() { for (int i = 0; i < numOfReadings; i++) { digitalWrite(initPin, HIGH); // посылаем импульс длительностью 10мс delayMicroseconds(10); digitalWrite(initPin, LOW); pulseTime = pulseIn(echoPin, HIGH); // Считываем длительность пришедшего импульса distance = pulseTime/58; // Дистанция = (длит. импульса / 58) см total= total - readings[arrayIndex]; readings[arrayIndex] = distance; total= total + readings[arrayIndex]; arrayIndex = arrayIndex + 1; // После того, как достигли последнего элемента, начинаем сначала if (arrayIndex >= numOfReadings) { arrayIndex = 0; } //Serial.println(distance, DEC); } averageDistance = total / numOfReadings; // вычисляем среднюю дистанцию //Serial.println(averageDistance, DEC); connection->write(2,(uint8_t*)&averageDistance); // Отсылаем 2 байта delay(10); } void playBeep() { for (int j = 0; j < 10; j++) { analogWrite(BeeperPin, 20); delay(50); analogWrite(BeeperPin, 0); delay(150); } }
В самом начале мы определяем 3 константы — это команды для передачи сообщений между устройствами: COMMAND_SEND_TRUE = 1, COMMAND_SEND_FALSE = 2, COMMAND_PLAY_BEEP = 3
Обработчик adbEventHandler() вызывается каждый раз при принятии данных и при наступлении других событий от ADB (открытие и закрытие соединения).
Функция makeDimension() производит 10 замеров расстояний, а затем вычисляет по ним среднее значение, которое через команду connection->write >() 2-мя байтами отправляется в Android устройство.
С функцией playBeep() все просто — она предназначена для проигрывания 10-ти коротких звуков через буззер.
Программа для Android
Наше окно активити будет состоять из следующих ключевых элементов:
кнопка (Button) — для посылки команды измерения расстояния
текстовое поле (TextView) — для отображения полученного расстояния
прогресс-бар (ProgressBar) — для визуального отображения расстояния (максимум — 500 см)
иконка соединения (ImageView) — отображается при активном соединении с Android устройством.
XML файл данного активити см. в прикрепленных файлах
Файл для главного Activity содержит следующий код:
package com.example.arduino54; import java.io.IOException; import org.microbridge.server.Server; import org.microbridge.server.AbstractServerListener; import com.example.arduino54.R; import android.os.AsyncTask; import android.os.Bundle; import android.app.Activity; import android.util.Log; import android.view.View; import android.widget.ImageView; import android.widget.ProgressBar; import android.widget.TextView; import android.widget.Button; public class MainActivity extends Activity { private int Distance = 0; public final String APP_NAME = "arduino54"; public final byte COMMAND_SEND_TRUE = 1; // Команда разрешения передачи public final byte COMMAND_SEND_FALSE = 2; // Команда запрета передачи public final byte COMMAND_PLAY_BEEP = 3; // Команда включения буззера public final int SYS_COMMAND_DATA = 0; // Внутренняя команда: передача данных public final int SYS_COMMAND_CONNECTED = 1; // Внутренняя команда: соединение установлено public final int SYS_COMMAND_DISCONNECTED = 2; // Внутренняя команда: соединение потеряно Server server = null; ImageView connectedImage; @Override public void onCreate(Bundle savedInstanceState) { super.onCreate(savedInstanceState); setContentView(R.layout.activity_main); // Создаем TCP сервер (на основе сервера MicroBridge LightWeight) try { server = new Server(4568); //Этот же порт необходимо использовать и на ADK-плате server.start(); } catch (IOException e) { Log.e(APP_NAME, "Unable to start TCP server", e); System.exit(-1); } connectedImage = (ImageView) findViewById(R.id.imageConnected); connectedImage.setAlpha(20); Button Button1 = (Button)findViewById(R.id.button1); Button1.setOnClickListener(new View.OnClickListener() { public void onClick(View v) { try { server.send(new byte[] {(byte) COMMAND_SEND_TRUE}); //Посылаем данные //Log.d(APP_NAME, "data_send:"+bSend); } catch (IOException e) { Log.e(APP_NAME, "Problem sending TCP message", e); } } }); server.addListener(new AbstractServerListener() { @Override public void onReceive(org.microbridge.server.Client client, byte[] data) { Log.d(APP_NAME, "data0:"+data[0]+"; data1:"+data[1]); if (data.length<2) Log.e(APP_NAME, "Размер данных менее 2-х байт:"+data.length); else { try { server.send(new byte[] {(byte) COMMAND_SEND_FALSE}); //Посылаем данные } catch (IOException e) { Log.e(APP_NAME, "Problem sending TCP message", e); } } Distance = ((data[1] << 8) | (data[0] & 0xFF)); // Формируем слово из 2-х байт //Any update to UI can not be carried out in a non UI thread like the one used //for Server. Hence runOnUIThread is used. runOnUiThread(new Runnable() { //@Override public void run() { new UpdateData().execute(Distance,SYS_COMMAND_DATA); } }); } //@Override public void onClientConnect(org.microbridge.server.Server server, org.microbridge.server.Client client){ Log.d(APP_NAME, "ClientConnected"); runOnUiThread(new Runnable() { public void run() { new UpdateData().execute(0,SYS_COMMAND_CONNECTED); } }); } public void onClientDisconnect(org.microbridge.server.Server server, org.microbridge.server.Client client){ Log.d(APP_NAME, "ClientDisconnected"); runOnUiThread(new Runnable() { public void run() { new UpdateData().execute(0,SYS_COMMAND_DISCONNECTED); } }); } }); } @Override protected void onDestroy (){ super.onDestroy(); server.stop(); } class UpdateData extends AsyncTask< Integer, Integer, Integer[]> { // Called to initiate the background activity @Override protected Integer[] doInBackground(Integer... ArdState) { if((ArdState[0] < 20) && (ArdState[0] != 0)){ //Если расстояние меньше 20см try { server.send(new byte[] {(byte) COMMAND_PLAY_BEEP}); } catch (IOException e) { Log.e(APP_NAME, "Problem sending TCP message", e); } } return (ArdState); //Возвращаем в onPostExecute() } @Override protected void onProgressUpdate(Integer... values) { super.onProgressUpdate(values); // Not used in this case } @Override protected void onPostExecute(Integer... result) { Log.d(APP_NAME, "onPostExecute[0]:"+result[0]); Log.d(APP_NAME, "onPostExecute[1]:"+result[1]); if(result[1] == 1){ connectedImage.setAlpha(255); } else if(result[1] == 2){ connectedImage.setAlpha(20); } TextView txt_Distance_Arduino = (TextView) findViewById(R.id.textDistance); txt_Distance_Arduino.setText(String.valueOf(result[0]+" см")); // Выводим на activity дистанцию ProgressBar mProgressBar = (ProgressBar)findViewById(R.id.progressBar1); mProgressBar.setProgress(result[0]); } } }
Здесь мы для класса server определяем метод server.addListener(new AbstractServerListener() {}), а также: onReceive(), onClientConnect() и onClientDisconnect() который вызывается при получении данных от сервера MicroBridge, при соединении и разьединении.
На кнопке Button1 мы вешаем обработчик события нажатия setOnClickListener(). При нажатии на кнопку вызывается данный метод и посылает на плату Arduino команду COMMAND_SEND_TRUE, по которой Arduino производит измерение расстояния и передачу значения расстояния.
В методе onReceive(), как только мы приняли данные, то мы сразу же отсылаем обратно команду COMMAND_SEND_FALSE, для того, чтобы Arduino выключил передачу пакетов. Об этом алгоритме я писал выше.
Обратите внимание, что для передачи данных отдельному потоку, мы используем внутренние системные команды SYS_COMMAND_DATA, SYS_COMMAND_CONNECTED и SYS_COMMAND_DISCONNECTED . Команды передаются 2-м элементом массива, а в первом элементе содержится измеренное расстояние, полученное от Arduino.
При срабатывании события onClientConnect(), создается новый поток в который передается массив с командой SYS_COMMAND_CONNECTED (в нашем случае 0), и в методе onPostExecute() путем установки значения Alpha в максимальное 255, происходит отображения иконки соединения. При поступлении команды SYS_COMMAND_DISCONNECTED устанавливается Alpha в значение 20, иконка становится блеклой и ее почти не видно, это означает что соединение не установлено. Прозрачность Alpha устанавливается методом setAlpha(int).
Когда поток принимает данные из метода onReceive, то в методе doInBackground() происходит сравнение условия, и если расстояние не рано нулю и меньше 20 см, то методом server.send() посылается команда COMMAND_PLAY_BEEP для включения буззера на плате Arduino.
В методе onPostExecute() происходит вывод UI элементов для отображения численного значения расстояния и полоски на прогрессбаре.
В прикрепленном файле вы можете скачать проекты для Arduino и Android, а также все необходимые библиотеки