Микросхема HMC5883L представляет собой 3-х осевой цифровой компас, работающий по шине IC. В качестве сенсоров используется три магниторезистивных датчика. Разработчик: компания Honeywell. Даташит PDF. Напряжение питания составляет 2.2-3.6В. Чувствительность датчика составляет 5 миллигаусс.
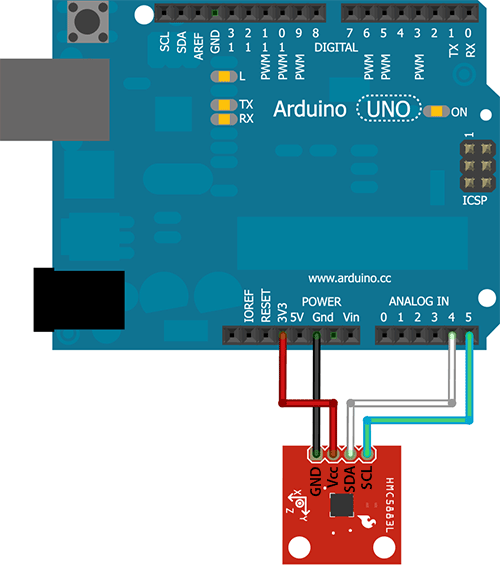
Датчик может использоваться в мобильных телефонах, планшетах, навигационном оборудовании и прочей потребительской электронике, но для радиолюбителей он может быть интересен тем, что цифровой компас может очень пригодится при конструировании роботов и радиоуправляемых моделей. В данном уроке мы рассмотрим подключение HMC5883L к Arduino. Т.к. датчик работает по шине IC, то схема подключения предельно проста:
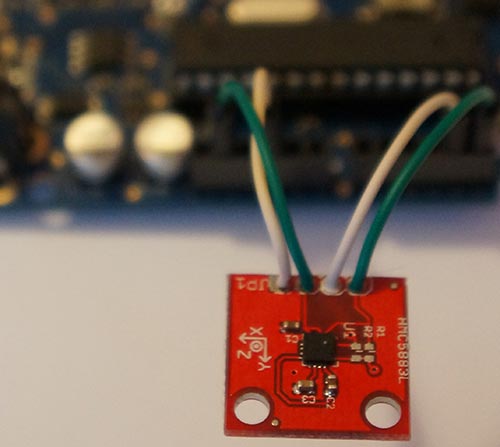
Т.к. сам чип компаса очень маленький 3×3 мм (16-ти выводной LPCC корпус), то некоторые фирмы выпускают платы с удобными выводами для подключения и распаянными подтягивающими резисторами. Именно такую плату мы и будем использовать в качестве примера.
Вывод SDA чипа подключаем к выводу SDA платы Arduino (обычно Analog IN 4), а вывод SCL чипа соответственно к выводу SCL платы Arduino (обычно Analog IN 5). На Arduino Mega это 20 и 21 пины. И не забываем питание 3.3В и общий GND.
На сайте bildr существует готовая библиотека для работы с датчиком. Ею мы и воспользуемся (немного подправив ошибку при проверке диапазона scale). Папку HMC5883L поместите в ваш каталог Libraries. Код работы с датчиком:
#include "Wire.h" #include "HMC5883L.h" HMC5883L compass; void setup(){ Serial.begin(9600); Wire.begin(); compass = HMC5883L(); // создаем экземпляр HMC5883L библиотеки setupHMC5883L(); // инициализация HMC5883L } void loop(){ float heading = getHeading(); Serial.println(heading); delay(250); } void setupHMC5883L(){ // инициализация HMC5883L, и проверка наличия ошибок int error; error = compass.SetScale(0.88); // чувствительность датчика из диапазона: 0.88, 1.3, 1.9, 2.5, 4.0, 4.7, 5.6, 8.1 if(error != 0) Serial.println(compass.GetErrorText(error)); // если ошибка, то выводим ее error = compass.SetMeasurementMode(Measurement_Continuous); // установка режима измерений как Continuous (продолжительный) if(error != 0) Serial.println(compass.GetErrorText(error)); // если ошибка, то выводим ее } float getHeading(){ // считываем данные с HMC5883L и рассчитываем направление MagnetometerScaled scaled = compass.ReadScaledAxis(); // получаем масштабированные элементы с датчика float heading = atan2(scaled.YAxis, scaled.XAxis); // высчитываем направление // корректируем значения с учетом знаков if(heading < 0) heading += 2*PI; if(heading > 2*PI) heading -= 2*PI; return heading * RAD_TO_DEG; // переводим радианы в градусы }
Чувствительность датчика задается функцией SetScale() и может быть выбрана только из следующих значений: 0.88, 1.3, 1.9, 2.5, 4.0, 4.7, 5.6, 8.1. Более подробно читайте даташит.
После загрузки скетча в контроллер Arduino и запуске утилиты мониторинга порта, вы должны увидеть поступающие данные с датчика:
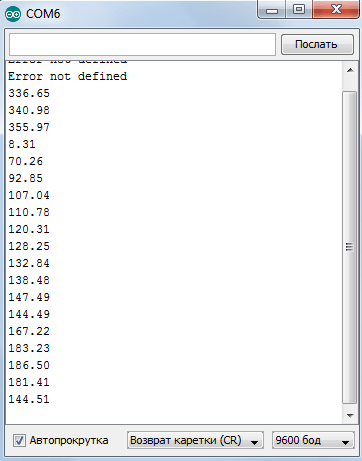
Вращая датчик вокруг своей оси, будет изменяться градус поворота. 0° — это будет север, а 180° — юг. Помните, что датчик очень чувствителен к любым намагниченным предметам, а также к сотовым телефонам и другим подобным устройствам излучающих магнитные поля. Также датчик необходимо располагать строго в горизонтальной плоскости, стоит его наклонить и тогда данные будут неверные. При применении цифровых компасов в робототехнике это необходимо учитывать и обычно, такие цифровые компасы применяют в паре с цифровым акселерометром, для компенсации наклона.