Уже всем известно что для управления электродвигателями с помощью микроконтроллера , необходимо использовать так называемый “драйвер” , который основан на принципе работы H-моста .Самой распространённой схемой используемой в качестве драйвера является L298N , с ней можно найти множество готовых модулей и использовать их в своем проекте . Но данная микросхема сильно греется в процессе работы , поэтому она всегда устанавливается на радиатор чтобы компенсировать тепловыделение и не перегреть микросхему .
Поэтому для создания нового драйвера управления был выбран двухканальный драйвер TB6612FNG в корпусе SSOP24 , он очень компактный и не имеет больших тепловых выделений , поэтому в радиаторе нет необходимости .
Он имеет следующие входные параметры :
- Максимальное напряжение на двигателях : 15 В
- Максимальный выходной ток : 1.2 А / 3.2 А(в пике)
- Напряжение питания драйвера : 6 В
- Управляющие напряжения : от -0.2 до 6 В
Схема подключения :
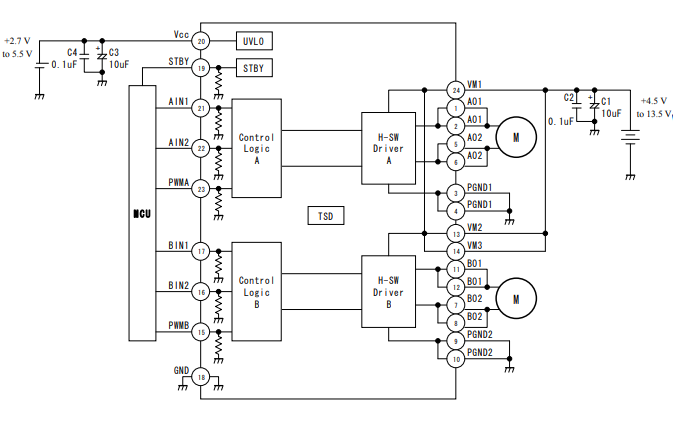
Очень удобно что подтягивающие резисторы уже находятся в корпусе , это позволяет избавиться от дополнительных резисторов в управляющей цепи и свести количество компонентов до минимума.
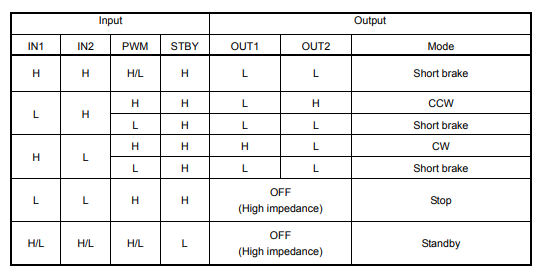
Скорость электродвигателей регулируется через подачи на входы PWMA и PWMB управляющего ШИМ сигнала .Направлением вращения управляют входы AIN1 ,AIN2, BIN1, BIN2.
Подробную схему управления можно посмотреть в следующей таблице :
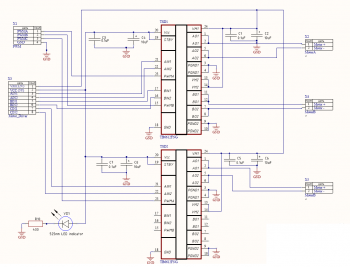
Данный проект разрабатывался в программе Altium Designer 17. Для своего случая я использовал 2 драйвера чтобы обеспечить управление 3 электродвигателями .
Принципиальная схема приведена на рисунке ниже :
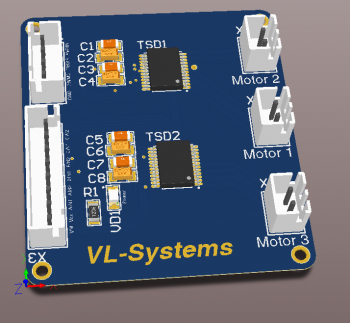
Gосле размещения компонентов и разводки платы , проект имеет следующий вид :
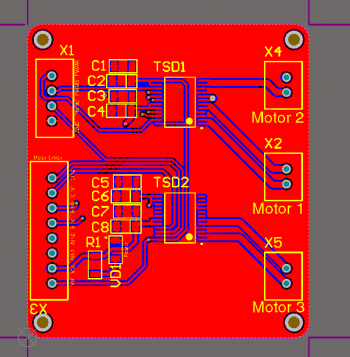
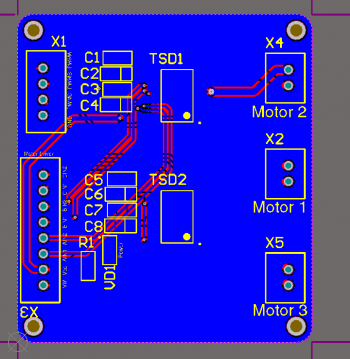
Из особенностей разводки стоит уделить внимание на два пункта :
- Входные конденсаторы , которые в данном случае являются фильтрами по питанию , должны располагаться максимально близко к микросхеме драйвера , чтобы максимально снизить помехи .
- Выходные цепи которые идут от микросхемы до разъемов подключения электродвигателей , должны соответствовать по толщине чтобы не было падения напряжения и чтобы дорожка не грелась в процессе работы .
Платы заказывались на PCBway и по прошествии 2 недель прибыли готовые платы:

После монтажа получилась вот такая плата :
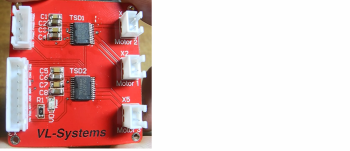
Драйвер рабочий и проверен при длительной работе. Никаких дополнительные настроек не требуется, в приложении имеются gerber-файлы для тех кто захочет повторить данный проект .