Примерно год назад я собирал подобное устройство, но использовал при этом не микроконтроллер, а обыкновенную логику, да еще микросхему памяти РФ5. Как следствие – большие габариты, вес и энергопотребление (аккумулятора 800mAh хватало на 5-10 минут работы). Именно эти недостатки предыдущего варианта натолкнули меня на создание этого. В отличии от своего предшественника, он собран всего на одной микросхеме и имеет стабилизацию «изображения».
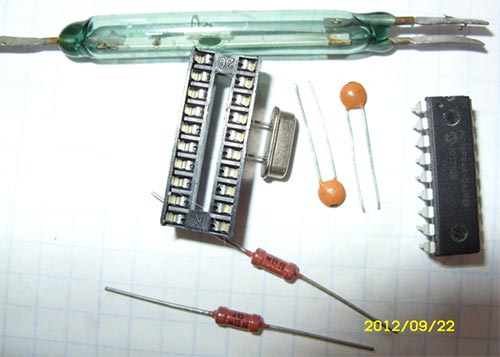
Для сборки нужна будет эта кучка деталей (не считая печатной платы, аккумулятора и светодиодов):
Вот схема устройства:
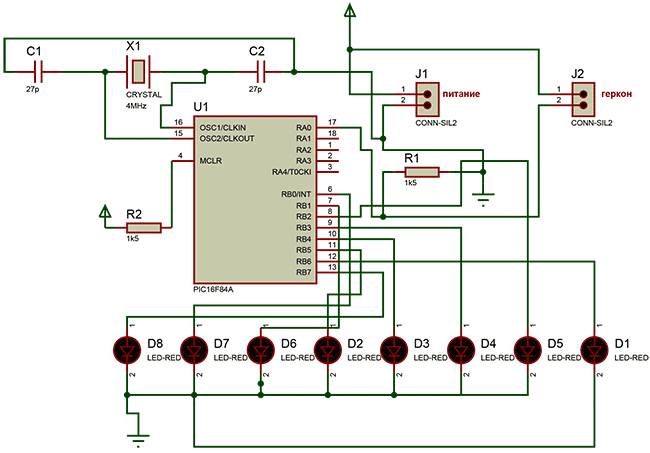
Как видите, деталей не много. Кроме обвязки генератора, тут всего лишь еще два резистора, не считая светодиодов. Что касается печатной платы устройства, тут дело обстоит немного сложнее, так как я старался сделать девайс как можно более компактным (в разумных пределах), в общем судите сами:
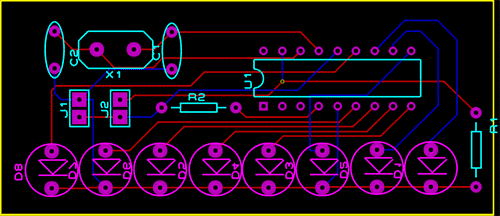
Плата получилась 30х70. Насчет печатных проводников: фактически значения не имеет, какой слой будет на лицевой стороне, какой со стороны деталей, но я развел проводники красного цвета со стороны деталей, а проводники синего – на лицевой (со стороны компонентов).
Теперь о программе. Ее я составлял, используя среды программирования Flowcode. Каждую букву я рисовал «построчно». Вот главная ветка программы:

Как видите, я решил не «валить все в кучу» в главной ветке, а распределил каждую букву по макросам. К примеру вот макрос буквы «О»:
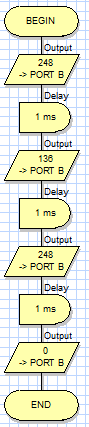
Отправлять в порт 0 нужно для того, чтобы не накладывалось изображение. Исходя из этого, если вам надо нарисовать свою букву, достаточно по очереди отправлять переменные в порт, рассмотрим например создание буквы «Т».
Для начала нужно нарисовать образец:
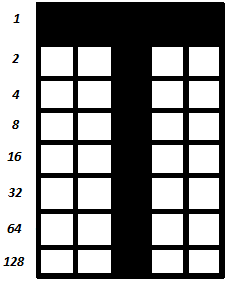
Далее находим в интернете калькулятор bin-dec. После вводим в поле ввода по очереди вертикальные столбцы рисунка (не закрашенная область -0, закрашенная –1). Причем, после каждого вывода переменной в порт ставим задержку в 1мс, иначе будет очень сложно (если возможно) что – то разобрать.
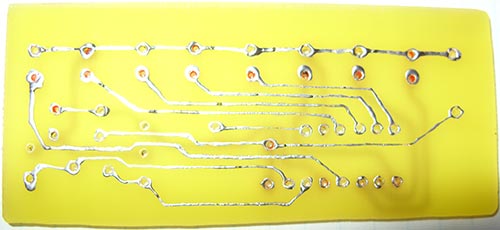
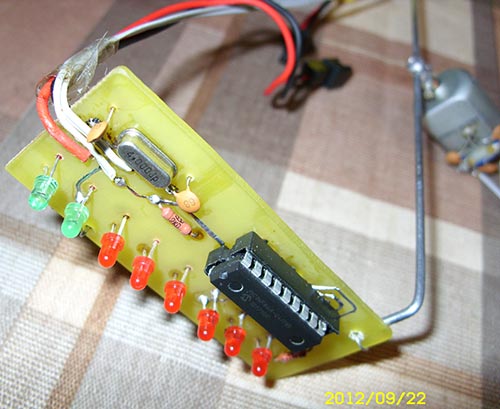
Вот весь процесс сборки, начиная от протравки платы и заканчивая готовым устройством.
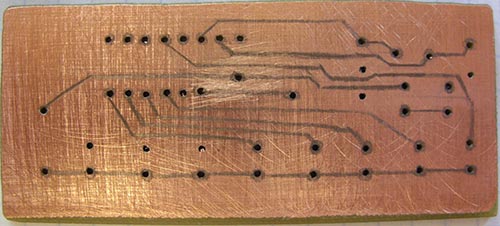
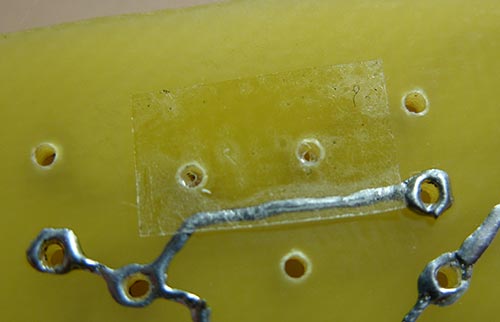
Кстати, обратите внимание на фото выше – так как печатный проводник касается корпуса кварцевого резонатора, я наклеил там маленький кусочек скотча (вообще то, это делать не так уж и обязательно, но решил перестраховаться).

Механическая часть.
Вот схематический рисунок кронштейна для крепления и вращения платы:
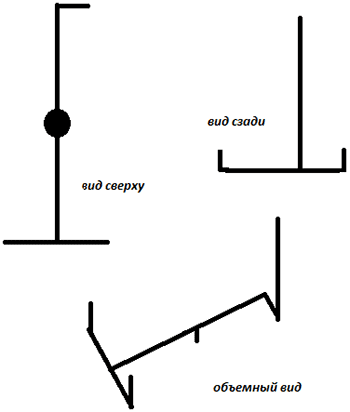
В реальной конструкции он выглядит так:

Для крепления кронштейна к валу электродвигателя я использовал обычные китайские клеммники

Можно взять любые, в зависимости от размеров вала вашего электродвигателя( в моем случае подошли на 6 А). Для наших целей нужна лишь металлическая муфта с шурупами. Один шуруп нужно выкрутить, и на его месте просверлить в противоположной стенке отверстие. Затем в это отверстие вставляется велосипедная спица и запаивается. Второй шуруп мы будем использовать почти по назначению – для фиксации вала двигателя. Так что получается вполне надежный крепеж (по крайнем мере у меня не слетело ни разу).

Детали и их замена
В этой конструкции я использовал резисторы МЛТ-0.125, кварцевый резонатор на 4MHz, дисковые керамические конденсаторы, микроконтроллер фирмы MICROCHIP PIC16F84A в корпусе DIP и геркон. Кстати что касается геркона: вообще то можно взять любой, но я выбрал относительно большой по размерам, так как его легче крепить. В моем случае крепление геркона – скотч:

Ниже есть видео работы (не судите за плохое качество, фотик ну никак не хотел ловить в кадр движущиеся светодиоды).
Скачать исходники, прошивку, ПП, проект в Proteus и Flowcode вы можете ниже
Прикрепленные файлы:
- stroka_POV.rar (112 Кб)